“Lumberjack”
-A lightweight pole climbing robot
Challenge: Design and construct a robot capable of climbing a pole, simulating a tree. The pole would have varying widths, material surfaces, and have branches as obstacles. The robot must be operated by raspberry pi, must fit within a 12”-18” cube at full extension, and have a goal weight of no more than 1 kg. The robot may be powered (but not controlled) by an umbilical line.
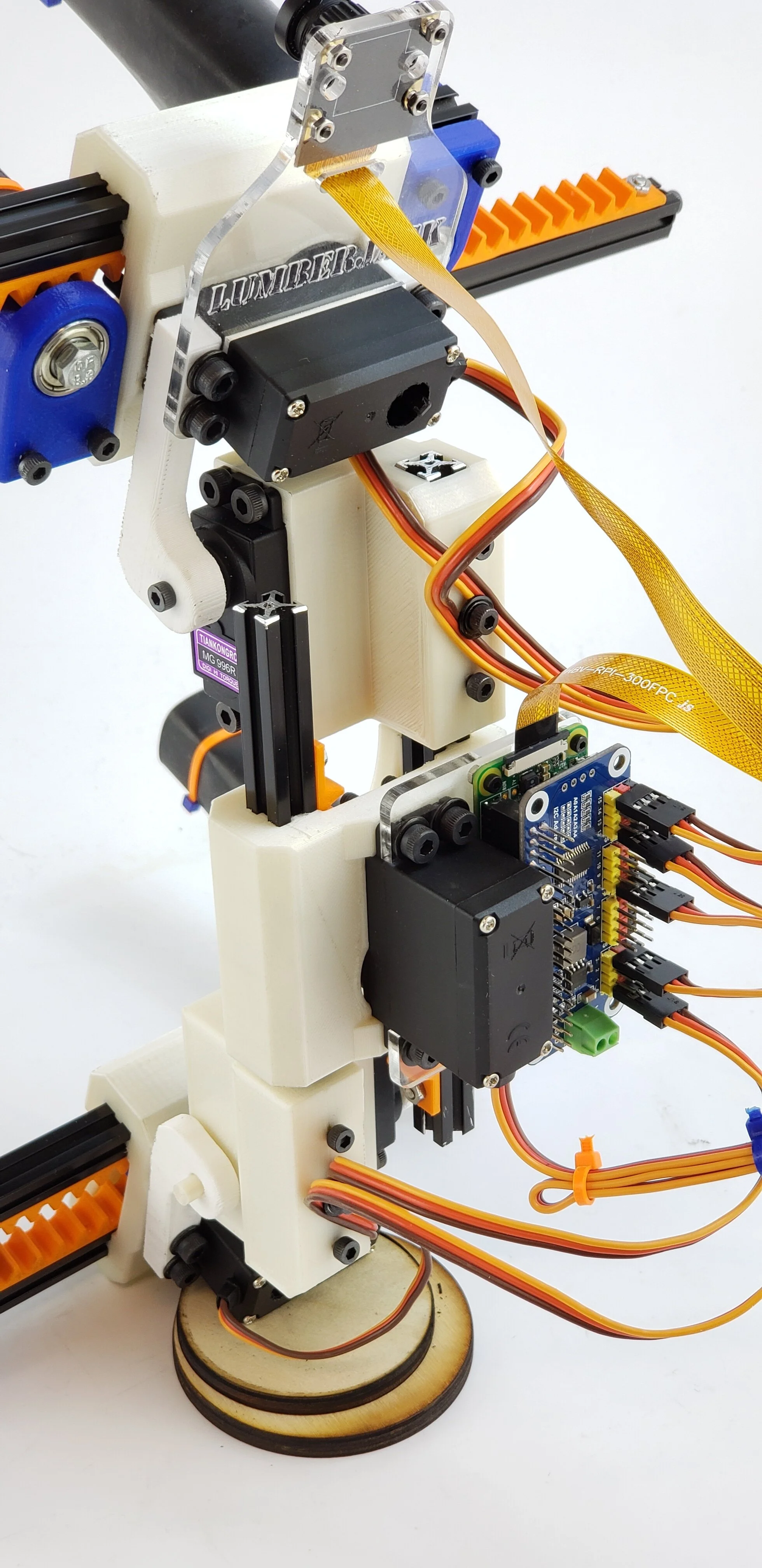
This project was the final assignment for my robotics class. My primary role in my team’s collaboration was to lead the drafting and assembly processes. After creating an initial test bed for optical material sensing and gripper testing, we decided to pursue a modular design, based around three primary dual-rack-and-pinion actuators joined at two pivots. This design allowed for our control board to be mounted centrally, with easy wire management. Additionally, the repeated modular design meant that a few replacement parts could be kept on-hand for maintenance, and gave our robot a clean, uniform look. To gain strength while keeping weight down, we based the robot’s skeletal structure around Makerbeam 10 mm extruded aluminum. The main PLA structures acted as linear bearings, retaining the aluminum extrusions even through extension and contraction.